Италијанските истражувачи претставија прототип на робот кој еден ден би можел да им биде асистент на астронаутите во одржувањето на инфраструктурата во вселенските станици, базите, па дури и на други планети.
Истражувачите од италијанскиот институт IIT (Istituto Italiano di Tecnologia) претставија револуционерна роботска платформа за употреба во вселената.
Го нарекоа MARM (Multi-Arm Relocatable Manipulator), делумно финансиран од Европската вселенска агенција, а во форма на прототип неодамна беше прикажан во јавноста.
Вселенски триножец
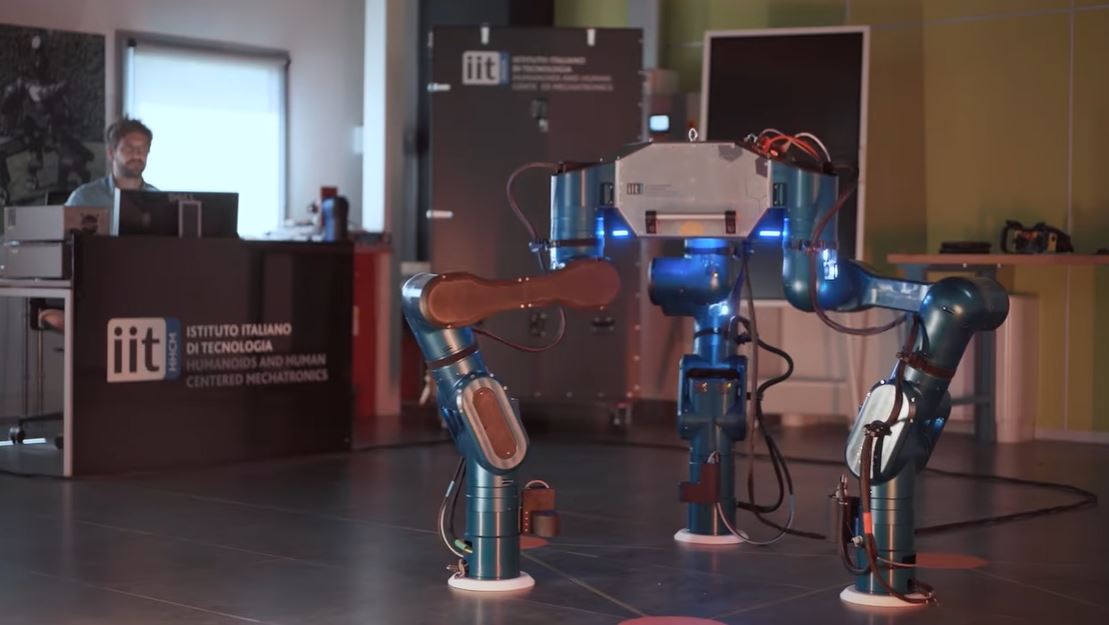
Како што можеме да видиме, станува збор за мобилен и разновиден робот со три нозе, кој може да манипулира со уште поголеми предмети.
На пример, може да натрупува шестоаголни подни плочи широки 1,2 метри и дебели 0,2 метри, со тежина до 12 килограми, а исто така може да натрупува различни модули како што често се наоѓаат на вселенските станици и големите орбитални вселенски летала.
Благодарение на дизајнот со три краци, MARM е постабилен, пофлексибилен и помобилен од роботите со четири нозе, има поголема мобилност и поширок опсег на движење. Со помош на трите нозе може да се движи, да „копа“ на своето место, а со средниот дел да зграпчува предмети и потоа да ги транспортира по потреба. Неговата главна цел е еден ден во иднина да им помогне на астронаутите при одржување на инфраструктурата – било во орбитата, на вселенските станици или на други планети. Поради оваа причина, ќе се тестира во симулатори за микрогравитација и бестежинска состојба.
Ќе има и функција на „перцепција“ на околината, па ќе може да извршува задачи без директен човечки надзор. Фаќањето, преместувањето на товарот и конечно неговото поставување на саканата локација ќе бидат примарните задачи за кои ќе се специјализира МАРМ, без оглед на гравитационите услови.
Доколку роботот се покаже како корисен и способен да ги извршува задачите што му се доделени на следните тестови, истражувачите на IIT велат дека ќе продолжат да ја развиваат конечната верзија, целосно подготвена за употреба во вселената.