{kind=link}
Истражувачите развија автономен систем за навигација за мали, лесни дронови, инспирирани од инсекти.
Тимот на TU Delft беше мотивиран од биолошки откритија за тоа како мравките ја користат нивната способност да ја видат околината и да ги пресметаат чекорите за безбедно да се вратат дома.
Според инженерите, роботите можат да патуваат долги растојанија користејќи го овој метод и да се вратат дома со минимална пресметка и меморија (0,65 килобајти на 100 m).
💡#aetudelft drone-researchers felt inspired by biological findings on how ants visually recognize their environment and combine it with counting their steps in order to get safely back home. They have published their findings in @SciRobotics: https://t.co/IlbvBXaroC pic.twitter.com/XQXsBr2FTT
— TU Delft | Aerospace Engineering (@AETUDelft) July 18, 2024
„Во иднина, малите автономни роботи би можеле да најдат широк спектар на намени, од следење на залихите во магацините до пронаоѓање на истекување гас во индустриските локации“, велат истражувачите во соопштението.
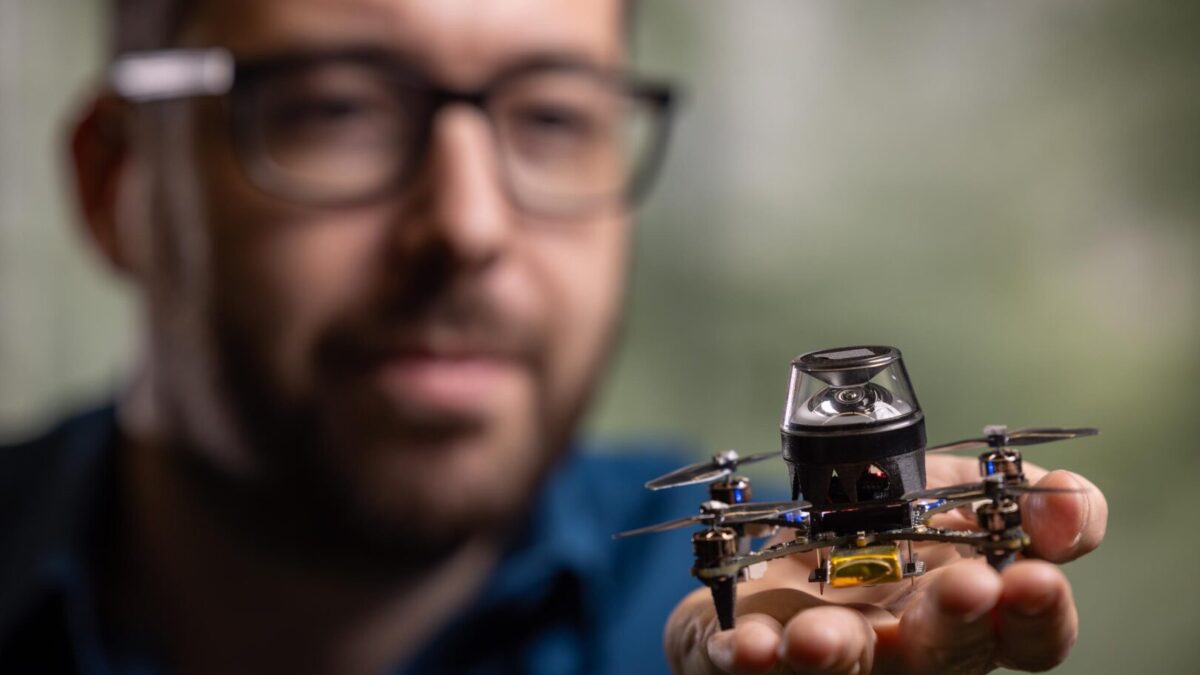
Малите роботи, со тежина од десет до неколку стотици грама, имаат значителен потенцијал за апликации во реалниот свет. Нивниот лесен дизајн осигурува безбедност, дури и ако се случат случајни судири, а нивната мала големина им овозможува да се движат во тесни области. Доколку се произведуваат по прифатлива цена, тие можат да се применат масовно, ефикасно покривајќи огромни површини како оранжерии.
Сепак, автономното работење е предизвик поради ограничените ресурси во споредба со поголемите дронови. Навигацијата е особено проблематична. Иако GPS може да помогне да се движите на отворено, тој е неефикасен во затворен простор и неточен во преполни средини.
Истражувачите се свртеа кон природата и добија инспирација од инсекти за да навигираат со мали роботи, користејќи минимални ресурси. Инсектите комбинираат одометрија (следење на движење) со визуелно водено однесување (меморија на погледот). Во моделот „snapshot“, инсектите како што се мравките периодично создаваат снимки од нивната околина.
Истражувачите го тестирале овој метод во неколку услови користејќи беспилотно летало CrazyFlie Brushless од 56 грама со панорамска камера, микроконтролер и 192 kB меморија.
Отпрвин, роботот полетал и летал кон својата цел, повремено запирајќи да ја фотографира околината. Беспилотното летало користело визуелно водство за да се врати на истиот пат, редовно правејќи корекции на курсот, споредувајќи ја неговата моментална локација со фотографиите за насоки.
Пристапот беше неверојатно ефикасен за меморија, поради високата компресија на сликата и прецизното растојание. Целата визуелна обработка се одвиваше на мал компјутер или микроконтролер, кој може да се најде во многу евтини електронски уреди.
Според истражувачкиот тим, предложената стратегија е помалку адаптивна од најсовремените методи, нема можност за мапирање, но овозможува враќање на почетната точка, што е адекватно за многу апликации.
Дроновите можат да летаат, да собираат податоци, а потоа да се вратат во базната станица за да спроведат активности како што се следење на посевите во оранжериите или следење на инвентарот во складиште. Сликите поврзани со целта може да се зачуваат на мала SD-картичка и подоцна да се обработуваат на серверот.